creo que la razon es pura y simplemente economica ya que tesla puede hacer un motor como el que describis pero a nivel industrial quizás no sea posible x ser demasiado $$$$El jue, 26 nov 2020 a las 17:49, Ricardo Berizzo (<rber...@gmail.com>) escribió:Estimados Amigos de los vehículos eléctricosLes acerco un artículo sobre consideraciones técnicas de este tipode motor para esta aplicación en particular.Saludos cordialesIng. Ricardo Berizzo-----------------------------------------------------------------------------------------------------------Motor trifásico de inducción para vehículos eléctricos
(Motor + inversor electrónico)
El motor de tracción de los vehículos eléctricos es responsable de convertir la energía eléctrica en energía mecánica de tal manera que el vehículo se propulsa para superar la resistencia aerodinámica, la resistencia a la rodadura y la resistencia cinética.
Algunos ingenieros e incluso investigadores pueden considerar los motores de tracción afines o similares a los motores industriales. Sin embargo, los motores de tracción generalmente requieren un arranque / parada frecuente, una alta tasa de aceleración / desaceleración, un alto par de torsión y baja velocidad para subir pendientes, un bajo par de torsión y una alta velocidad de crucero y un rango de velocidad de operación muy amplio, mientras que los motores de uso industrial generalmente se optimizan en condiciones nominales. Por lo tanto, los motores de tracción son tan únicos que merecen formar una clase individual. Los requisitos generales del motor de tracción son significativamente diferentes de los motores trifásicos para aplicaciones industriales corrientes.
Se amplía el concepto: dos motores de igual características (U, I, P, n) pero uno de los destinado a accionar un ascensor y otro un ventilador, por ejemplo, no tienen porqué ser iguales.
-En el primer caso el motor estará sometido frecuentemente a períodos de arranque, marcha y frenado.
-En el segundo caso lo habitual es que, en funcionamiento, permanezca durante largo tiempo en servicio en el mismo régimen.
En consecuencia los calentamientos que se producen en ambos motores no son iguales y eso puede afectar a su tamaño, sistema de ventilación, tipos de materiales, etc.
El incremento de temperatura sobre la del ambiente, que experimenta una máquina en servicio está provocado por el aporte de calor producida por las pérdidas: efecto joule, pérdidas en el hierro, etc.
La temperatura final dependerá de la capacidad de evacuar calor, tal capacidad aumenta con la superficie exterior. Se puede aumentar la evacuación forzándola por medio de refrigeración adicionales como ventiladores o mediante la circulación interna de fluidos refrigerantes.
También observamos que algunas de sus principales diferencias se encuentran en los requisitos de carga mecánica, las especificaciones de rendimiento y el entorno operativo, como por ejemplo:
- Operación en un amplio rango de par y velocidad. Ello obliga a analizar el comportamiento del motor en todo el rango posible de funcionamiento, teniendo especial cuidado en el cálculo correcto del par, corriente, frecuencia de alimentación, etc., así como los efectos que ello produce: temperatura en las
distintas partes de la máquina, par máximo en caso de motores de inducción, efecto pelicular y de proximidad en el devanado, corrientes de Foucault en imanes…
- Reducido volumen disponible para el motor. Esto, sumado a la exigencia de los puntos de operación de la aplicación, conlleva a que las saturaciones magnéticas del diseño del motor sean elevadas, provocando que, para calcular correctamente el funcionamiento del motor, se necesitan modelos más complejos que los empleados tradicionalmente. Junto con las saturaciones magnéticas, la alta frecuencia fundamental de alimentación hace que se deba tener especial cuidado en el cálculo de las pérdidas en el hierro de la máquina.
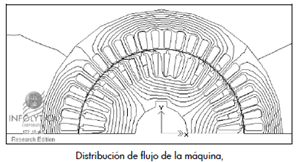
En una máquina eléctrica el flujo magnético de cada polo tiene su camino a través de la culata del estator (yugo), de la masa polar, del entrehierro entre la masa polar y el inducido, de los dientes del inducido, del núcleo del inducido y luego se cierra a través de los dientes del inducido.
Este circuito magnético cerrado pasa dos veces a través del entrehierro, de los dientes y de la masa polar. En un motor trifásico de inducción el grado de saturación entre rotor y estator son diferentes ya que el diente y yugo de rotor se encuentran más saturados que el diente y yugo de estator, dado su diámetro menor.
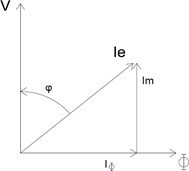
El principio básico del método de control vectorial se encarga de independizar la magnetización de la máquina y el torque desarrollado. Si se analiza en el diagrama fasorial, V (tensión aplicada al estator del motor) vs ∅ (campo magnético resultante en el motor), observamos el fasor de corriente en el estator Ie, cuyas componentes son descompuestas en dos: I∅ como corriente magnetizante e Im corriente motriz, que es la que genera el par motor real.
El sistema de control electrónico corrige en todo momento el ángulo φ en función de la velocidadrotor del motor, manteniendo así el flujo, y consecuentemente el par aplicado al mismo.
Este ángulo es calculado por el inversor funcionando en un lazo cerrado junto con un sensor de velocidad (encoder) que determina el desplazamiento entre rotor y estator. El encoder también es utilizado por el controlador para el sistema de frenado regenerativo.
Por otro lado, hay que tener en cuenta que en técnicas de control vectorial por parte del inversor electrónico, el uso del modelo convencional del motor de inducción únicamente se justifica con flujo constante e igual al nominal. Cuando se requieren cambios en el nivel de flujo, el modelo lineal no proporciona resultados satisfactorios. El trabajo en la zona de debilitamiento de campo, o la optimización de determinadas magnitudes como el factor de potencia o el rendimiento, implican cambios en el nivel de flujo y demandan de una adecuada caracterización del comportamiento magnético de la máquina. El debilitamiento de campo no deseado demostrado por estos motores no especialmente diseñados para tracción, disminuye el par disponible para los requerimientos de la conducción.
En la literatura especializada se señala la conveniencia de modelar adecuadamente este fenómeno de la saturación magnética para el correcto diseño del inversor, en lo referente a la impedancia que presenta el motor saturado a los distintos armónicos presentes en la alimentación.
En referencia a las temperaturas, las bobinas de cobre son aisladas con polímeros especiales (como mínimo Clase H 180º) que facilitan la transferencia de calor y garantizan la fiabilidad en las exigencias de la conducción de alto rendimiento en condiciones extremas. Las altas corrientes de estator significan altas corrientes de rotor, a diferencia de los motores de inducción típicos que emplean aluminio para sus conductores, los conductores del rotor (barras) son de cobre.
El cobre, aunque más difícil de trabajar, tiene una resistencia mucho menor y por lo tanto puede manejar corrientes más altas en un volumen menor. Se tiene especial cuidado en el diseño del motor para manejar altas r.p.m. (por ejemplo: 14.000 rpm).
A modo de ejemplo se adjunta datos del motor que diseñó Tesla Motor para sus vehículos: Inducción trifásico refrigerado por aire. 185 kwpico, 4 polos, máx rpm: 14 000, Par máximo 270 Nm que se obtiene en el rango 0-6000 rpm. Eficiencia: 90% promedio, el 80% en potencia pico. Aleacion de aluminio y rodamientos de cerámica.
Como conclusión podemos decir que todos los puntos enunciados brevemente más arriba pone en evidencia algo que se manifiesta en la práctica. Hermanar un motor trifásico con un inversor electrónico que no fueron diseñados para tracción eléctrica da como resultado una prestación mucho más pobre en lo referente a potencia, par y eficiencia motriz. Lo cual converge en un rendimiento mucho menor de la energía disponible, que redunda en la atenuación de la autonomía del vehículo.
Ing. Ricardo Berizzo
Cátedra: Movilidad Eléctrica
U.T.N. – Regional Rosario
--
Has recibido este mensaje porque estás suscrito al grupo "Vehículos eléctricos" de Grupos de Google.
Para cancelar la suscripción a este grupo y dejar de recibir sus mensajes, envía un correo electrónico a vehiculos-electr...@googlegroups.com.
Para ver esta conversación en el sitio web, visita https://groups.google.com/d/msgid/vehiculos-electricos/CABKMCctVS1MC40dN6S7GT-v-Ugx--5p8DBVXH9%3DrP0CBLEdRyg%40mail.gmail.com.

Has recibido este mensaje porque estás suscrito al grupo "Vehículos eléctricos" de Grupos de Google.
Para cancelar la suscripción a este grupo y dejar de recibir sus mensajes, envía un correo electrónico a vehiculos-electricos+unsubscribe@googlegroups.com.
Para ver esta conversación en el sitio web, visita https://groups.google.com/d/msgid/vehiculos-electricos/0458cb47-1be5-4601-bbdc-2610a80a5cden%40googlegroups.com.





0 comentarios:
Publicar un comentario